人工智能在汽車領域的運用是人工智能技術的重要組成部分,包括無人車、無人公交和無人配送等。海內外各大企業爭相加大人工智能在汽車領域應用的研發投入。尤其是非傳統的汽車廠商,包括各大IT和互聯網公司,以及新興的公司,比如Tesla,蔚來汽車等。

自動駕駛汽車的參與公司
無人駕駛研究
2015年7月,特斯拉首次向用戶推送autopilot自動駕駛功能;2016年10月,谷歌宣布其研發的無人駕駛汽車已經在電腦的控制下安全行駛了300萬公里。在無人公交方面。2016年9月,首輛無人駕駛Uber在美匹茲堡上路;人工智能在汽車的其他應用包括進行耕作和收割的農業機械,如度假村、旅游景區、機場、礦區、碼頭等地接送人等。
2017年10月,通用汽車計劃成為第一家在紐約市測試無人駕駛汽車的公司,以此確立其在無人駕駛領域的領導地位,為無人駕駛的商業化邁出了重要一步。近年來,Google、Tesla、Uber、百度等科技公司一直不遺余力地開發無人駕駛技術。例如,Google研發的無人汽車在道路上累積行駛已經超過3百萬英里,且在過去一年時間內,其模擬行駛的里程數也超過了10億英里。受這些科技公司的影響,傳統汽車公司也紛紛加入無人駕駛的研發大潮中。例如,寶馬聯手英特爾,計劃在2017年讓40輛寶馬無人駕駛汽車開始路測。
無人駕駛的意義無疑是重大的。據統計,僅中國每年因為車輛的交通事故而死亡的人數達10萬多人,受傷的人數達200多萬人,而發生糾紛與沖突的人數更高達600多萬人。其中,約90%的事故原因來自于駕駛員的錯誤,比如:30%的事故是由于駕駛員醉酒,10%的事故則是駕駛員分心造成的。無人駕駛能減少由駕駛員操作失誤造成的交通事故,同時也為由于身體原因不能駕駛的人駕車出行提供了可能。而且,無人駕駛也能人類從簡單、重復的駕駛中解放出來,提高生產力,“延長”生命。
從系統的角度看,無人駕駛技術是一個復雜的,需要軟硬件相結合的系統,其框架一般都如圖26所示。無人車主要分為三個模塊:感知模塊,高精度地圖模塊、駕駛行為決策模塊。感知模塊主要是通過攝像頭,激光雷達等傳感器來感知周圍的環境,為無人車的駕駛提供環境信息支撐。高精度地圖模塊則為無人車提供精確的定位與全局路徑的規劃。而駕駛行為決策模塊則依據前兩個模塊提供的數據,由適當的模型來規劃駕駛方案,統籌安排無人車的行駛。
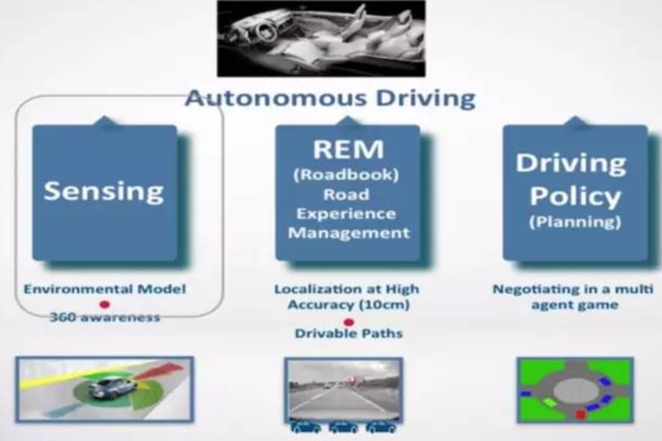
無人駕駛的基本框架
大多數汽車制造商已經開始承諾,到2020年,至少半自動駕駛汽車可以上路。無人駕駛是自動駕駛的終極階段,美國國家公路交通安全管理局(NHTSA)和國際汽車工程師協會(SAE)制定的標準,將汽車的自動程度分為五級:

無人駕駛的等級
Level 0:無自動化;
Level 1:駕駛員輔助。單個輔助駕駛系統能根據駕駛環境信息,以特定模式或者轉向,或者執行加速、減速等操作,其他操作都由人類駕駛員完成;
Level 2:一個或多個輔助駕駛系統能根據駕駛環境信息,以特定模式同時轉向或者加速減速操作,其他操作都由人類駕駛員完成;
Level 3:有條件自動化。一個自動化駕駛系統,能在動態駕駛中,全面承擔駕駛任務,但在系統提出接管請求時,需要人類司機做出回應;
Level 4:高度自動化。即使在系統提出接管請求時,人類司機不能回應,這類系統也能在動態駕駛中全面承擔駕駛任務;
Level 5:完全自動化。自己開車,在任何道路、任何環境狀況下都不需要人類司機的介入。
無人駕駛涉及的新技術
一般而言,無人駕駛系統一般有三大模塊。
(1)環境感知模塊
無人駕駛汽車是通過傳感器來感知環境信息。比如攝像頭、激光雷達、毫米波雷達以及工業相機是用于獲取環境信息;而GPS等用于獲取車身狀態的信息。當然還需要通過算法提取出有用的信息。
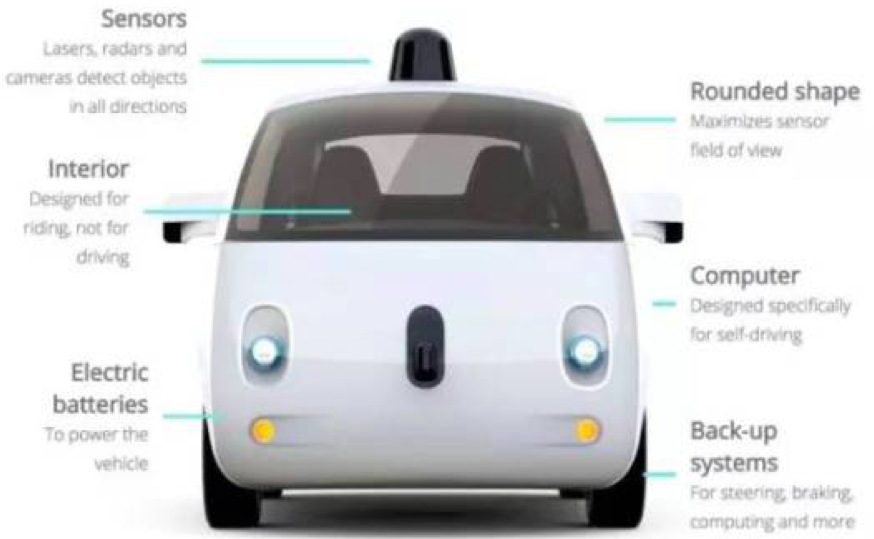
無人駕駛系統模塊(谷歌無人車)
(2)行為決策模塊
行為決策是指無人駕駛汽車根據路網信息、獲取的交通環境信息和自身行駛狀態,產生遵守交通規則的駕駛決策的過程。即規劃出一條精密的行駛軌跡,然后無人駕駛車就可以跟著這條軌跡走。
(3)運動控制模塊
運動控制模塊是根據規劃的行駛軌跡和速度以及當前的位置、姿態和速度,產生對油門、剎車、方向盤和變速桿的控制命令。
無人駕駛的實現路徑大概有兩大派系,一派是以谷歌為主的互聯網公司,一派以特斯拉為首的汽車制造商。
谷歌的藍圖是無人車完全取代人來駕駛,把無人車看成機器人,所以沒有方向盤、油門和剎車。
谷歌無人車頂上是約8萬美元的64線激光雷達(Lidar)。它在高速旋轉時發射激光測量與周邊物體的距離,再根據距離數據描繪出精細的3D 地形圖,并跟高分辨率地圖數據相結合建模,幫計算機做決策。

無人駕駛案例
這條技術路線的關鍵是對周圍環境的模擬和3D地圖數據,而谷歌在這方面有深厚的積累。
而特斯拉的計劃是從機器輔助駕駛進化到完全自動駕駛。所以技術上逐步實現自動剎車、定速巡航、自適應巡航等,最終完全自動駕駛。
特斯拉Model S主要是靠攝像頭結合計算機視覺,特斯拉輔助駕駛使用的硬件包括前置攝像頭、前置雷達(相對廉價的毫米波雷達)、12個超聲波傳感器,目前沒有使用高精度地圖。
簡單的說前者(Google無人車)更重定位,是高精度定位+高精度地圖+識別,偏機器人的方案,后者更重視識別(低精度定位+低精度地圖+高準確率識別),后者接近于人開車,人開車不需要高精度地圖。
那么自動駕駛汽車涉及哪些技術呢?下面是一部分通用的技術。
無人駕駛的決策模型
行為決策是指根據路網信息、獲取的交通環境信息和自身行駛狀態,產生遵守交通規則的駕駛決策的過程。學術界的一個解決方案是用現在很火的深度學習,來實現模仿性學習(Behavioral Cloning),但是可靠性上可能有問題,實際應用中還是會有大量的規則等方式。
(1)識別并躲避障礙物
這個問題的解決方案是傳感器融合算法,利用多個傳感器所獲取的關于環境全面的信息,通過融合算法來實現障礙物識別與跟蹤和躲避。
根據周邊信息,在地圖上定位車輛。在地圖上定位汽車,這一塊實現的差異很大。由于民用GPS誤差過大,不能直接用于無人駕駛。有一類定位是通過激光雷達使周圍物體和自車的距離的精度達到厘米級,配合三維地圖數據可以將車輛定位至幾厘米至十幾厘米的程度。還有一類通過還計算機視覺的方案來定位,也就是(SLAM)。
(2)從相機中識別行人
從相機中識別行人是一個計算機視覺問題,需要利用攝像機識別出物體,在這里指人。
車道識別
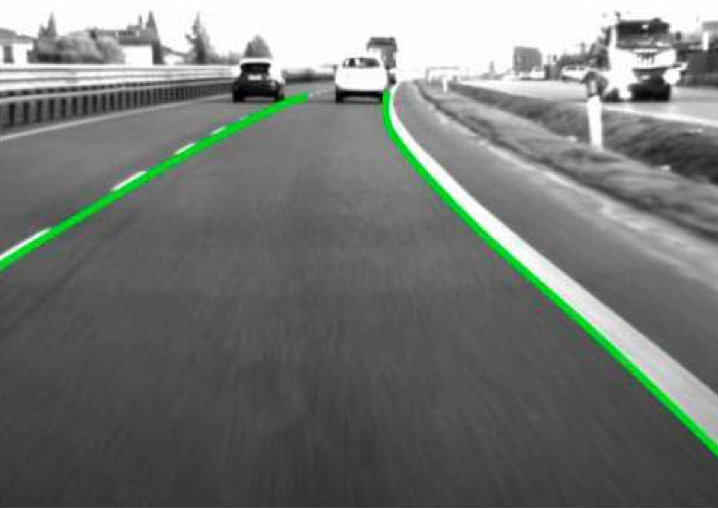
(3)車道識別
車道識別也是計算機視覺問題,有道路線檢測算法。簡單的方法有顏色選擇,切圖(ROI, Region of Interest Selection),灰度處理,高斯模糊,邊緣檢測和霍夫變換直線檢測。如果能夠識別一張圖片中的道路線,那么對于行駛中的車輛上攝像頭實時采集的圖像也可以實時分析。
高級的道路線檢測需要計算相機校準矩陣和失真系數對原始圖像的失真進行校正;使用圖像處理方法,將圖像進行二值化處理;應用透視變換來糾正二值化圖像(“鳥瞰視圖”);檢測車道并查找確定車道的曲率和相對于中心的車輛位置;將檢測到的車道邊界扭曲回原始圖像;可視化車道,輸出車道曲率和車輛位置。
(4)交通標志識別
無人車也是要懂得交通規則的,所以識別交通標志并根據標志的指示執行不同指令也非常重要。這也是個計算機視覺問題,可以用深度學習(卷積神經網絡)的方法來完成。

交通標志識別
(5)車輛的自適應巡航控制
車輛的自適應巡航控制(ACC)是在定速巡航控制的基礎上,通過距離傳感器實時測量本車與前車的距離和相對速度,計算出合適的油門或剎車的控制量,并進行自動調節,這一塊有不少成熟的方案。
(6)讓汽車在預定軌跡上運動
讓汽車在預定軌跡上運動是機器控制和規劃問題,比如在躲避突發障礙之后動態路線規劃。
2018年3月20日凌晨,全球出現首例在自動駕駛模式下運行的自動駕駛車輛導致人員死亡。該事件的發生一定程度上是對無人駕駛商用信心的打擊,并說明了現有無人車測試的四大關鍵系統的不足。在無人車測試時,以下極大系統在檢測障礙物或者行人時產生重要作用。
安步(廣州)新能源電動車輛有限公司(簡稱:安步優品)位于廣州市番禺區,專業研發、生產、銷售以及維修新能源電動汽車、城市物流車、、觀光擺渡車、地產看樓車、社區服務用車、醫療服務用車以及酒店服務用車等各種用途的高速車輛和低速場地用車,主要產品包括雷丁新能源汽車、低速電動汽車、、、、電動貨車、電動牽引車、電動醫療救傷車、電動環衛車、微型消防車(電動/汽油機)以及進口等全系列四輪電動車車型。
了解更多無人駕駛汽車相關資訊,敬請訪問安步優品官方網站!